كيفية صنع الذكاء الاصطناعي للغزال في الوحدة
في تطوير اللعبة، إضافة Artificial Intelligence تعني كتابة التعليمات البرمجية التي ستتحكم في كيان اللعبة دون أي مدخلات خارجية.
الذكاء الاصطناعي الحيواني في الألعاب هو فرع من الذكاء الاصطناعي يهدف إلى ترجمة سلوك الحيوان إلى البيئة الرقمية للعبة لخلق تجربة واقعية.
في هذا البرنامج التعليمي، سأعرض كيفية إنشاء ذكاء اصطناعي لحيوان بسيط (غزال) في Unity والذي سيكون له حالتين، الخمول والهروب.
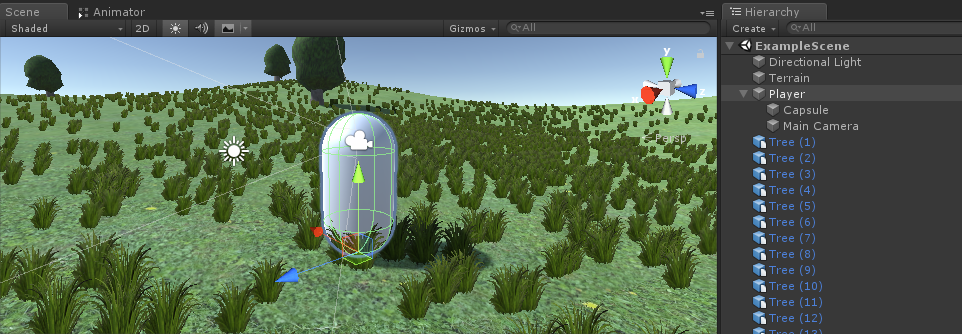
الخطوة 1: إعداد المشهد ونموذج الغزلان
سنحتاج إلى مستوى ونموذج الغزلان.
بالنسبة للمستوى، سأستخدم تضاريس بسيطة بها بعض العشب والأشجار:

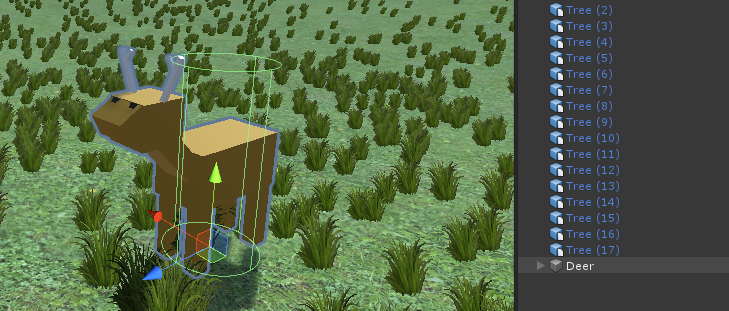
بالنسبة لنموذج الغزلان، قمت ببساطة بدمج بعض المكعبات (ولكن يمكنك استخدام نموذج الغزلان):

الآن دعنا ننتقل إلى جزء الترميز.
الخطوة 2: إعداد وحدة تحكم المشغل
نبدأ بإعداد وحدة تحكم المشغل حتى نتمكن من التجول واختبار الذكاء الاصطناعي:
- قم بإنشاء سكريبت جديد، وقم بتسميته SC_CharacterController والصق الكود أدناه بداخله:
SC_CharacterController.cs
using UnityEngine;
[RequireComponent(typeof(CharacterController))]
public class SC_CharacterController : MonoBehaviour
{
public float speed = 7.5f;
public float jumpSpeed = 8.0f;
public float gravity = 20.0f;
public Camera playerCamera;
public float lookSpeed = 2.0f;
public float lookXLimit = 45.0f;
CharacterController characterController;
Vector3 moveDirection = Vector3.zero;
Vector2 rotation = Vector2.zero;
[HideInInspector]
public bool canMove = true;
void Start()
{
characterController = GetComponent<CharacterController>();
rotation.y = transform.eulerAngles.y;
}
void Update()
{
if (characterController.isGrounded)
{
// We are grounded, so recalculate move direction based on axes
Vector3 forward = transform.TransformDirection(Vector3.forward);
Vector3 right = transform.TransformDirection(Vector3.right);
float curSpeedX = speed * Input.GetAxis("Vertical");
float curSpeedY = speed * Input.GetAxis("Horizontal");
moveDirection = (forward * curSpeedX) + (right * curSpeedY);
if (Input.GetButton("Jump"))
{
moveDirection.y = jumpSpeed;
}
}
// Apply gravity. Gravity is multiplied by deltaTime twice (once here, and once below
// when the moveDirection is multiplied by deltaTime). This is because gravity should be applied
// as an acceleration (ms^-2)
moveDirection.y -= gravity * Time.deltaTime;
// Move the controller
characterController.Move(moveDirection * Time.deltaTime);
// Player and Camera rotation
if (canMove)
{
rotation.y += Input.GetAxis("Mouse X") * lookSpeed;
rotation.x += -Input.GetAxis("Mouse Y") * lookSpeed;
rotation.x = Mathf.Clamp(rotation.x, -lookXLimit, lookXLimit);
playerCamera.transform.localRotation = Quaternion.Euler(rotation.x, 0, 0);
transform.eulerAngles = new Vector2(0, rotation.y);
}
}
}![]()
- قم بإنشاء GameObject جديد وقم بتسميته "Player" وقم بتغيير علامته إلى "Player"
- قم بإنشاء كبسولة جديدة (GameObject -> كائن ثلاثي الأبعاد -> كبسولة)، ثم اجعلها كائنًا فرعيًا للكائن "Player"، وقم بتغيير موضعه إلى (0، 1، 0)، وقم بإزالة مكون CapsuleCollider الخاص به.
- حرك الكاميرا الرئيسية داخل الكائن "Player" وقم بتغيير موضعه إلى (0، 1.64، 0)
- قم بإرفاق البرنامج النصي SC_CharacterController بكائن "Player" (ستلاحظ أنه سيضيف أيضًا مكونًا آخر يسمى Character Controller. اضبط القيمة المركزية له على (0، 1، 0))
- قم بتعيين الكاميرا الرئيسية للمتغير "Player Camera" في SC_CharacterController ثم احفظ المشهد
وحدة تحكم المشغل جاهزة الآن.
الخطوة 3: برنامج Deer AI
الآن دعنا ننتقل إلى الجزء الذي نقوم فيه ببرمجة Deer AI:
- أنشئ نصًا جديدًا وأطلق عليه اسم SC_DeerAI (سيتحكم هذا البرنامج النصي في حركة الذكاء الاصطناعي):
![]()
افتح SC_DeerAI وتابع الخطوات أدناه:
في بداية البرنامج النصي، نتأكد من تضمين كافة الفئات الضرورية (على وجه التحديد UnityEngine.AI):
using UnityEngine;
using UnityEngine.AI;
using System.Collections.Generic;
public class SC_DeerAI : MonoBehaviour
{الآن دعونا نضيف جميع المتغيرات:
public enum AIState { Idle, Walking, Eating, Running }
public AIState currentState = AIState.Idle;
public int awarenessArea = 15; //How far the deer should detect the enemy
public float walkingSpeed = 3.5f;
public float runningSpeed = 7f;
public Animator animator;
//Trigger collider that represents the awareness area
SphereCollider c;
//NavMesh Agent
NavMeshAgent agent;
bool switchAction = false;
float actionTimer = 0; //Timer duration till the next action
Transform enemy;
float range = 20; //How far the Deer have to run to resume the usual activities
float multiplier = 1;
bool reverseFlee = false; //In case the AI is stuck, send it to one of the original Idle points
//Detect NavMesh edges to detect whether the AI is stuck
Vector3 closestEdge;
float distanceToEdge;
float distance; //Squared distance to the enemy
//How long the AI has been near the edge of NavMesh, if too long, send it to one of the random previousIdlePoints
float timeStuck = 0;
//Store previous idle points for reference
List<Vector3> previousIdlePoints = new List<Vector3>(); ثم نقوم بتهيئة كل شيء في الفراغ Start():
// Start is called before the first frame update
void Start()
{
agent = GetComponent<NavMeshAgent>();
agent.stoppingDistance = 0;
agent.autoBraking = true;
c = gameObject.AddComponent<SphereCollider>();
c.isTrigger = true;
c.radius = awarenessArea;
//Initialize the AI state
currentState = AIState.Idle;
actionTimer = Random.Range(0.1f, 2.0f);
SwitchAnimationState(currentState);
}(كما ترون، قمنا بإضافة مصادم كروي تم وضع علامة عليه كمشغل. سيكون هذا المصادم بمثابة منطقة وعي عندما يدخل العدو إليه).
يتم تنفيذ منطق الذكاء الاصطناعي الفعلي في التحديث الفارغ () مع بعض الوظائف المساعدة:
// Update is called once per frame
void Update()
{
//Wait for the next course of action
if (actionTimer > 0)
{
actionTimer -= Time.deltaTime;
}
else
{
switchAction = true;
}
if (currentState == AIState.Idle)
{
if(switchAction)
{
if (enemy)
{
//Run away
agent.SetDestination(RandomNavSphere(transform.position, Random.Range(1, 2.4f)));
currentState = AIState.Running;
SwitchAnimationState(currentState);
}
else
{
//No enemies nearby, start eating
actionTimer = Random.Range(14, 22);
currentState = AIState.Eating;
SwitchAnimationState(currentState);
//Keep last 5 Idle positions for future reference
previousIdlePoints.Add(transform.position);
if (previousIdlePoints.Count > 5)
{
previousIdlePoints.RemoveAt(0);
}
}
}
}
else if (currentState == AIState.Walking)
{
//Set NavMesh Agent Speed
agent.speed = walkingSpeed;
// Check if we've reached the destination
if (DoneReachingDestination())
{
currentState = AIState.Idle;
}
}
else if (currentState == AIState.Eating)
{
if (switchAction)
{
//Wait for current animation to finish playing
if(!animator || animator.GetCurrentAnimatorStateInfo(0).normalizedTime - Mathf.Floor(animator.GetCurrentAnimatorStateInfo(0).normalizedTime) > 0.99f)
{
//Walk to another random destination
agent.destination = RandomNavSphere(transform.position, Random.Range(3, 7));
currentState = AIState.Walking;
SwitchAnimationState(currentState);
}
}
}
else if (currentState == AIState.Running)
{
//Set NavMesh Agent Speed
agent.speed = runningSpeed;
//Run away
if (enemy)
{
if (reverseFlee)
{
if (DoneReachingDestination() && timeStuck < 0)
{
reverseFlee = false;
}
else
{
timeStuck -= Time.deltaTime;
}
}
else
{
Vector3 runTo = transform.position + ((transform.position - enemy.position) * multiplier);
distance = (transform.position - enemy.position).sqrMagnitude;
//Find the closest NavMesh edge
NavMeshHit hit;
if (NavMesh.FindClosestEdge(transform.position, out hit, NavMesh.AllAreas))
{
closestEdge = hit.position;
distanceToEdge = hit.distance;
//Debug.DrawLine(transform.position, closestEdge, Color.red);
}
if (distanceToEdge < 1f)
{
if(timeStuck > 1.5f)
{
if(previousIdlePoints.Count > 0)
{
runTo = previousIdlePoints[Random.Range(0, previousIdlePoints.Count - 1)];
reverseFlee = true;
}
}
else
{
timeStuck += Time.deltaTime;
}
}
if (distance < range * range)
{
agent.SetDestination(runTo);
}
else
{
enemy = null;
}
}
//Temporarily switch to Idle if the Agent stopped
if(agent.velocity.sqrMagnitude < 0.1f * 0.1f)
{
SwitchAnimationState(AIState.Idle);
}
else
{
SwitchAnimationState(AIState.Running);
}
}
else
{
//Check if we've reached the destination then stop running
if (DoneReachingDestination())
{
actionTimer = Random.Range(1.4f, 3.4f);
currentState = AIState.Eating;
SwitchAnimationState(AIState.Idle);
}
}
}
switchAction = false;
}
bool DoneReachingDestination()
{
if (!agent.pathPending)
{
if (agent.remainingDistance <= agent.stoppingDistance)
{
if (!agent.hasPath || agent.velocity.sqrMagnitude == 0f)
{
//Done reaching the Destination
return true;
}
}
}
return false;
}
void SwitchAnimationState(AIState state)
{
//Animation control
if (animator)
{
animator.SetBool("isEating", state == AIState.Eating);
animator.SetBool("isRunning", state == AIState.Running);
animator.SetBool("isWalking", state == AIState.Walking);
}
}
Vector3 RandomNavSphere(Vector3 origin, float distance)
{
Vector3 randomDirection = Random.insideUnitSphere * distance;
randomDirection += origin;
NavMeshHit navHit;
NavMesh.SamplePosition(randomDirection, out navHit, distance, NavMesh.AllAreas);
return navHit.position;
}(تقوم كل حالة بتهيئة القيم وهدف NavMesh Agent للحالة التالية. على سبيل المثال، تحتوي حالة الخمول على نتيجتين محتملتين، فهي إما تقوم بتهيئة حالة التشغيل إذا كان العدو موجودًا أو حالة الأكل إذا لم يعبر أي عدو منطقة الوعي.
يتم استخدام حالة المشي بين حالات الأكل للانتقال إلى الوجهة الجديدة.
حالة التشغيل تحسب الاتجاه بالنسبة لموقع العدو، للتشغيل منه مباشرة.
إذا كان عالقًا في الزاوية، يتراجع الذكاء الاصطناعي إلى أحد أوضاع الخمول المحفوظة مسبقًا. يتم فقدان العدو بعد أن يكون الذكاء الاصطناعي بعيدًا بما فيه الكفاية عن العدو).
وأخيرًا، أضفنا حدث OnTriggerEnter الذي سيراقب Sphere Collider (المعروف أيضًا باسم منطقة الوعي) وسيقوم بتهيئة حالة التشغيل بمجرد اقتراب العدو كثيرًا:
void OnTriggerEnter(Collider other)
{
//Make sure the Player instance has a tag "Player"
if (!other.CompareTag("Player"))
return;
enemy = other.transform;
actionTimer = Random.Range(0.24f, 0.8f);
currentState = AIState.Idle;
SwitchAnimationState(currentState);
}بمجرد دخول اللاعب إلى الزناد، يتم تعيين متغير العدو وتهيئة حالة الخمول، وبعد ذلك تتم تهيئة حالة التشغيل.
يوجد أدناه البرنامج النصي النهائي SC_DeerAI.cs:
//You are free to use this script in Free or Commercial projects
//sharpcoderblog.com @2019
using UnityEngine;
using UnityEngine.AI;
using System.Collections.Generic;
public class SC_DeerAI : MonoBehaviour
{
public enum AIState { Idle, Walking, Eating, Running }
public AIState currentState = AIState.Idle;
public int awarenessArea = 15; //How far the deer should detect the enemy
public float walkingSpeed = 3.5f;
public float runningSpeed = 7f;
public Animator animator;
//Trigger collider that represents the awareness area
SphereCollider c;
//NavMesh Agent
NavMeshAgent agent;
bool switchAction = false;
float actionTimer = 0; //Timer duration till the next action
Transform enemy;
float range = 20; //How far the Deer have to run to resume the usual activities
float multiplier = 1;
bool reverseFlee = false; //In case the AI is stuck, send it to one of the original Idle points
//Detect NavMesh edges to detect whether the AI is stuck
Vector3 closestEdge;
float distanceToEdge;
float distance; //Squared distance to the enemy
//How long the AI has been near the edge of NavMesh, if too long, send it to one of the random previousIdlePoints
float timeStuck = 0;
//Store previous idle points for reference
List<Vector3> previousIdlePoints = new List<Vector3>();
// Start is called before the first frame update
void Start()
{
agent = GetComponent<NavMeshAgent>();
agent.stoppingDistance = 0;
agent.autoBraking = true;
c = gameObject.AddComponent<SphereCollider>();
c.isTrigger = true;
c.radius = awarenessArea;
//Initialize the AI state
currentState = AIState.Idle;
actionTimer = Random.Range(0.1f, 2.0f);
SwitchAnimationState(currentState);
}
// Update is called once per frame
void Update()
{
//Wait for the next course of action
if (actionTimer > 0)
{
actionTimer -= Time.deltaTime;
}
else
{
switchAction = true;
}
if (currentState == AIState.Idle)
{
if(switchAction)
{
if (enemy)
{
//Run away
agent.SetDestination(RandomNavSphere(transform.position, Random.Range(1, 2.4f)));
currentState = AIState.Running;
SwitchAnimationState(currentState);
}
else
{
//No enemies nearby, start eating
actionTimer = Random.Range(14, 22);
currentState = AIState.Eating;
SwitchAnimationState(currentState);
//Keep last 5 Idle positions for future reference
previousIdlePoints.Add(transform.position);
if (previousIdlePoints.Count > 5)
{
previousIdlePoints.RemoveAt(0);
}
}
}
}
else if (currentState == AIState.Walking)
{
//Set NavMesh Agent Speed
agent.speed = walkingSpeed;
// Check if we've reached the destination
if (DoneReachingDestination())
{
currentState = AIState.Idle;
}
}
else if (currentState == AIState.Eating)
{
if (switchAction)
{
//Wait for current animation to finish playing
if(!animator || animator.GetCurrentAnimatorStateInfo(0).normalizedTime - Mathf.Floor(animator.GetCurrentAnimatorStateInfo(0).normalizedTime) > 0.99f)
{
//Walk to another random destination
agent.destination = RandomNavSphere(transform.position, Random.Range(3, 7));
currentState = AIState.Walking;
SwitchAnimationState(currentState);
}
}
}
else if (currentState == AIState.Running)
{
//Set NavMesh Agent Speed
agent.speed = runningSpeed;
//Run away
if (enemy)
{
if (reverseFlee)
{
if (DoneReachingDestination() && timeStuck < 0)
{
reverseFlee = false;
}
else
{
timeStuck -= Time.deltaTime;
}
}
else
{
Vector3 runTo = transform.position + ((transform.position - enemy.position) * multiplier);
distance = (transform.position - enemy.position).sqrMagnitude;
//Find the closest NavMesh edge
NavMeshHit hit;
if (NavMesh.FindClosestEdge(transform.position, out hit, NavMesh.AllAreas))
{
closestEdge = hit.position;
distanceToEdge = hit.distance;
//Debug.DrawLine(transform.position, closestEdge, Color.red);
}
if (distanceToEdge < 1f)
{
if(timeStuck > 1.5f)
{
if(previousIdlePoints.Count > 0)
{
runTo = previousIdlePoints[Random.Range(0, previousIdlePoints.Count - 1)];
reverseFlee = true;
}
}
else
{
timeStuck += Time.deltaTime;
}
}
if (distance < range * range)
{
agent.SetDestination(runTo);
}
else
{
enemy = null;
}
}
//Temporarily switch to Idle if the Agent stopped
if(agent.velocity.sqrMagnitude < 0.1f * 0.1f)
{
SwitchAnimationState(AIState.Idle);
}
else
{
SwitchAnimationState(AIState.Running);
}
}
else
{
//Check if we've reached the destination then stop running
if (DoneReachingDestination())
{
actionTimer = Random.Range(1.4f, 3.4f);
currentState = AIState.Eating;
SwitchAnimationState(AIState.Idle);
}
}
}
switchAction = false;
}
bool DoneReachingDestination()
{
if (!agent.pathPending)
{
if (agent.remainingDistance <= agent.stoppingDistance)
{
if (!agent.hasPath || agent.velocity.sqrMagnitude == 0f)
{
//Done reaching the Destination
return true;
}
}
}
return false;
}
void SwitchAnimationState(AIState state)
{
//Animation control
if (animator)
{
animator.SetBool("isEating", state == AIState.Eating);
animator.SetBool("isRunning", state == AIState.Running);
animator.SetBool("isWalking", state == AIState.Walking);
}
}
Vector3 RandomNavSphere(Vector3 origin, float distance)
{
Vector3 randomDirection = Random.insideUnitSphere * distance;
randomDirection += origin;
NavMeshHit navHit;
NavMesh.SamplePosition(randomDirection, out navHit, distance, NavMesh.AllAreas);
return navHit.position;
}
void OnTriggerEnter(Collider other)
{
//Make sure the Player instance has a tag "Player"
if (!other.CompareTag("Player"))
return;
enemy = other.transform;
actionTimer = Random.Range(0.24f, 0.8f);
currentState = AIState.Idle;
SwitchAnimationState(currentState);
}
}- ضع نموذج Deer في المشهد وأرفق مكون NavMesh Agent والبرنامج النصي SC_DeerAI ومكون Animator به:

يحتوي SC_DeerAI على متغير واحد فقط يجب تعيينه وهو "Animator".
يتطلب مكون الرسوم المتحركة وحدة تحكم تحتوي على 4 رسوم متحركة: الرسوم المتحركة الخاملة، والرسوم المتحركة للمشي، والرسوم المتحركة للأكل، والرسوم المتحركة للتشغيل، و3 معلمات منطقية: isEating، وisRunning، وisWalking:
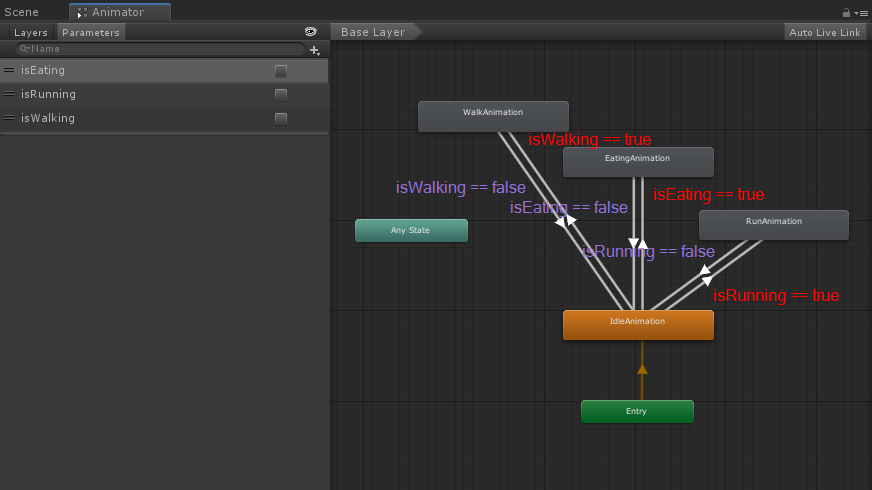
يمكنك معرفة كيفية إعداد وحدة تحكم Animator بسيطة بالنقر فوق هنا
بعد تعيين كل شيء، هناك شيء أخير يجب القيام به، وهو خبز NavMesh.
- حدد جميع كائنات المشهد التي ستكون ثابتة (مثل التضاريس والأشجار وما إلى ذلك) وقم بوضع علامة عليها كـ "Navigation Static":
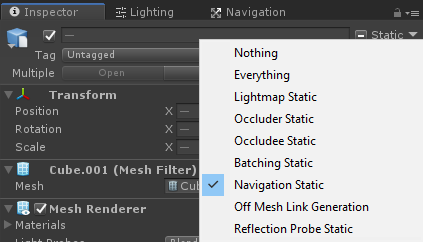
- انتقل إلى نافذة التنقل (نافذة -> AI -> التنقل) وانقر فوق علامة التبويب "Bake" ثم انقر فوق الزر "Bake". بعد خبز NavMesh، يجب أن يبدو كما يلي:

بعد خبز NavMesh، يمكننا اختبار الذكاء الاصطناعي:

كل شيء يعمل كما هو متوقع. يهرب الغزال عندما يقترب العدو ويستأنف أنشطته المعتادة بمجرد أن يكون العدو بعيدًا بدرجة كافية.